
- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

స్టెప్పర్ మోటార్లు మరియు సర్వోస్ మరియు సర్వో మోటార్లు మధ్య వ్యత్యాసాన్ని అర్థం చేసుకోవడానికి ఒక కథనం
I. స్టెప్పర్ మోటార్లు మరియు సర్వోస్ మరియు సర్వో మోటార్లు మధ్య తేడాలు
స్టెప్పర్ మోటార్: ఓపెన్-లూప్ కంట్రోల్ ఎలిమెంట్ స్టెప్పర్ మోటార్ పార్ట్ల కోణీయ స్థానభ్రంశం లేదా లైన్ డిస్ప్లేస్మెంట్గా విద్యుత్ పల్స్ సిగ్నల్. సరళంగా చెప్పాలంటే, ఇది కోణం మరియు మలుపుల సంఖ్యను నియంత్రించడానికి విద్యుత్ పల్స్ సిగ్నల్పై ఆధారపడుతుంది. కాబట్టి అతను ఎంత భ్రమణాన్ని నిర్ణయించడానికి పల్స్ సిగ్నల్పై మాత్రమే ఆధారపడతాడు. సెన్సార్ లేనందున, ఆపే కోణం విచలనం కావచ్చు. అయితే, ఖచ్చితమైన పల్స్ సిగ్నల్ విచలనాన్ని తగ్గిస్తుంది.
సర్వో మోటార్: మోటారు వేగాన్ని నియంత్రించడానికి సర్వో కంట్రోల్ సర్క్యూట్పై ఆధారపడండి, భ్రమణ స్థానాన్ని నియంత్రించడానికి సెన్సార్ ద్వారా. కాబట్టి స్థానం నియంత్రణ చాలా ఖచ్చితమైనది. మరియు భ్రమణ వేగం కూడా వేరియబుల్.
సర్వో (ఎలక్ట్రానిక్ సర్వో): సర్వో యొక్క ప్రధాన భాగం సర్వో మోటార్. ఇది సర్వో మోటార్ కంట్రోల్ సర్క్యూట్ + తగ్గింపు గేర్ సెట్ను కలిగి ఉంది. అయ్యో, సర్వో మోటార్కి తగ్గింపు గేర్ సెట్ లేదు. మరియు సర్వోలో తగ్గింపు గేర్ సెట్ ఉంది.
పరిమితి సర్వో విషయంలో, ఇది చుక్కాని చేయి యొక్క స్టీరింగ్ కోణాన్ని నిర్ణయించడానికి అవుట్పుట్ షాఫ్ట్ కింద ఉన్న పొటెన్షియోమీటర్పై ఆధారపడుతుంది. సర్వో సిగ్నల్ నియంత్రణ అనేది పల్స్ వెడల్పు మాడ్యులేటెడ్ (PWM) సిగ్నల్, ఇక్కడ మైక్రోకంట్రోలర్ ఈ సిగ్నల్ని సులభంగా ఉత్పత్తి చేయగలదు.
II. స్టెప్పర్ మోటార్ ప్రాథమిక సూత్రం
ఇది ఎలా పని చేస్తుంది:
సాధారణంగా మోటారు యొక్క రోటర్ శాశ్వత అయస్కాంతం, మరియు స్టేటర్ వైండింగ్ల ద్వారా కరెంట్ ప్రవహించినప్పుడు, స్టేటర్ వైండింగ్లు వెక్టర్ అయస్కాంత క్షేత్రాన్ని ఉత్పత్తి చేస్తాయి. ఈ అయస్కాంత క్షేత్రం రోటర్ను ఒక కోణం ద్వారా తిప్పేలా చేస్తుంది, తద్వారా రోటర్ యొక్క అయస్కాంత క్షేత్రాల జత దిశ స్టేటర్ యొక్క అయస్కాంత క్షేత్రం యొక్క దిశ వలె ఉంటుంది. స్టేటర్ యొక్క వెక్టార్ అయస్కాంత క్షేత్రం కోణం ద్వారా తిరుగుతున్నప్పుడు. రోటర్ కూడా ఈ అయస్కాంత క్షేత్రంతో ఒక కోణంతో తిరుగుతుంది. ప్రతి ఇన్పుట్ ఎలక్ట్రికల్ పల్స్ కోసం, మోటారు ఒక కోణీయ అడుగు ముందుకు తిప్పుతుంది. దాని అవుట్పుట్ కోణీయ స్థానభ్రంశం ఇన్పుట్ పప్పుల సంఖ్యకు అనులోమానుపాతంలో ఉంటుంది మరియు దాని భ్రమణ వేగం పప్పుల ఫ్రీక్వెన్సీకి అనులోమానుపాతంలో ఉంటుంది. వైండింగ్లు శక్తినిచ్చే క్రమాన్ని మార్చడం ద్వారా, మోటారు రివర్స్ అవుతుంది. అందువల్ల, స్టెప్పర్ మోటార్ యొక్క భ్రమణాన్ని నియంత్రించడానికి పప్పుల సంఖ్య మరియు ఫ్రీక్వెన్సీ మరియు మోటారు యొక్క ప్రతి దశ యొక్క వైండింగ్లను శక్తివంతం చేసే క్రమాన్ని నియంత్రించవచ్చు.
ఉష్ణ ఉత్పత్తి సూత్రం:
సాధారణంగా అన్ని రకాల మోటార్లు చూడండి, అంతర్గత ఐరన్ కోర్ మరియు వైండింగ్ కాయిల్. వైండింగ్ రెసిస్టెన్స్, పవర్ నష్టాన్ని ఉత్పత్తి చేస్తుంది, నష్టం పరిమాణం మరియు ప్రతిఘటన మరియు కరెంట్ చతురస్రానికి అనులోమానుపాతంలో ఉంటుంది, దీనిని తరచుగా రాగి నష్టంగా సూచిస్తారు, కరెంట్ ప్రామాణిక DC లేదా సైన్ వేవ్ కాకపోతే, హార్మోనిక్ నష్టాన్ని కూడా ఉత్పత్తి చేస్తుంది; కోర్ హిస్టెరిసిస్ ఎడ్డీ కరెంట్ ప్రభావాన్ని కలిగి ఉంటుంది, ప్రత్యామ్నాయ అయస్కాంత క్షేత్రంలో కూడా నష్టాన్ని ఉత్పత్తి చేస్తుంది, పదార్థం యొక్క పరిమాణం, కరెంట్, ఫ్రీక్వెన్సీ, వోల్టేజ్ సంబంధిత, దీనిని ఇనుము నష్టం అంటారు. రాగి నష్టం మరియు ఇనుము నష్టం ఉష్ణ ఉత్పత్తి రూపంలో వ్యక్తమవుతుంది, తద్వారా మోటారు సామర్థ్యాన్ని ప్రభావితం చేస్తుంది. స్టెప్పింగ్ మోటార్ సాధారణంగా పొజిషనింగ్ ఖచ్చితత్వం మరియు టార్క్ అవుట్పుట్ను అనుసరిస్తుంది, సామర్థ్యం సాపేక్షంగా తక్కువగా ఉంటుంది, కరెంట్ సాధారణంగా పెద్దదిగా ఉంటుంది మరియు హార్మోనిక్ భాగాలు ఎక్కువగా ఉంటాయి, కరెంట్ యొక్క ఫ్రీక్వెన్సీ వేగం మరియు మార్పుతో ప్రత్యామ్నాయంగా ఉంటుంది, కాబట్టి స్టెప్పింగ్ మోటార్లు సాధారణంగా వేడి పరిస్థితిని కలిగి ఉంటాయి మరియు సాధారణ AC మోటార్ కంటే పరిస్థితి మరింత తీవ్రంగా ఉంటుంది.
III. చుక్కాని నిర్మాణం
సర్వో ప్రధానంగా హౌసింగ్, సర్క్యూట్ బోర్డ్, డ్రైవ్ మోటార్, గేర్ రిడ్యూసర్ మరియు పొజిషన్ డిటెక్షన్ ఎలిమెంట్తో కూడి ఉంటుంది. దీని పని సూత్రం ఏమిటంటే, రిసీవర్ సర్వోకి సిగ్నల్ పంపుతుంది మరియు సర్క్యూట్ బోర్డ్లోని IC కోర్లెస్ మోటారును తిప్పడం ప్రారంభించడానికి డ్రైవ్ చేస్తుంది మరియు శక్తి తగ్గింపు గేర్ ద్వారా స్వింగ్ ఆర్మ్కు ప్రసారం చేయబడుతుంది మరియు అదే సమయంలో, పొజిషన్ డిటెక్టర్ అది స్థానానికి వచ్చిందో లేదో తెలుసుకోవడానికి తిరిగి సిగ్నల్ను పంపుతుంది. పొజిషన్ డిటెక్టర్ నిజానికి వేరియబుల్ రెసిస్టర్. సర్వో తిరిగేటప్పుడు, రెసిస్టర్ విలువ తదనుగుణంగా మారుతుంది మరియు రెసిస్టర్ విలువను గుర్తించడం ద్వారా భ్రమణ కోణాన్ని తెలుసుకోవచ్చు. జనరల్ సర్వో మోటార్ అనేది మూడు-పోల్ రోటర్ చుట్టూ చుట్టబడిన ఒక సన్నని రాగి తీగ, కాయిల్ ద్వారా కరెంట్ ప్రవహించినప్పుడు అయస్కాంత క్షేత్రాన్ని ఉత్పత్తి చేస్తుంది మరియు రోటర్ అయస్కాంతం యొక్క అంచు వికర్షణను ఉత్పత్తి చేస్తుంది, ఇది భ్రమణ శక్తిని ఉత్పత్తి చేస్తుంది. భౌతికశాస్త్రం ప్రకారం, ఒక వస్తువు యొక్క జడత్వం యొక్క క్షణం దాని ద్రవ్యరాశికి నేరుగా అనులోమానుపాతంలో ఉంటుంది, కాబట్టి తిప్పవలసిన వస్తువు యొక్క ద్రవ్యరాశి ఎక్కువ, ఎక్కువ శక్తి అవసరం. వేగవంతమైన భ్రమణ వేగం మరియు తక్కువ విద్యుత్ వినియోగాన్ని సాధించడానికి, సర్వో సన్నని రాగి తీగలతో చాలా సన్నని బోలు సిలిండర్గా మెలితిప్పబడి, స్తంభాలు లేకుండా చాలా తేలికైన బోలు రోటర్ను ఏర్పరుస్తుంది మరియు సిలిండర్ లోపల అయస్కాంతాలు ఉంచబడతాయి, ఇది బోలు కప్పు మోటారు.
వివిధ పని వాతావరణాలకు అనుగుణంగా, వాటర్ప్రూఫ్ మరియు డస్ట్ప్రూఫ్ డిజైన్లతో సర్వోలు ఉన్నాయి; మరియు వివిధ లోడ్ అవసరాలకు ప్రతిస్పందనగా, సర్వోస్ కోసం ప్లాస్టిక్ మరియు మెటల్ గేర్లు ఉన్నాయి మరియు సర్వోస్ కోసం మెటల్ గేర్లు సాధారణంగా అధిక-టార్క్ మరియు అధిక-వేగంతో ఉంటాయి, అధిక లోడ్ల కారణంగా గేర్లు చిప్ చేయబడవు. భ్రమణాన్ని వేగంగా మరియు మరింత ఖచ్చితమైనదిగా చేయడానికి హయ్యర్ గ్రేడ్ సర్వోలు బాల్ బేరింగ్లతో అమర్చబడి ఉంటాయి. ఒక బాల్ బేరింగ్ మరియు రెండు బాల్ బేరింగ్ల మధ్య వ్యత్యాసం ఉంది, అయితే రెండు బాల్ బేరింగ్లు మంచివి. కొత్త FET సర్వోలు ప్రధానంగా FET (ఫీల్డ్ ఎఫెక్ట్ ట్రాన్సిస్టర్)ని ఉపయోగిస్తున్నాయి, ఇది తక్కువ అంతర్గత నిరోధం యొక్క ప్రయోజనాన్ని కలిగి ఉంది మరియు అందువల్ల సాధారణ ట్రాన్సిస్టర్ల కంటే తక్కువ కరెంట్ నష్టాన్ని కలిగి ఉంటుంది.
IV. సర్వో ఆపరేషన్ సూత్రం
ఒక బయాస్ వోల్టేజ్ని ఉత్పత్తి చేయడానికి అంతర్గత సర్క్యూట్లోకి pwm వేవ్ నుండి, రిడక్షన్ గేర్ ద్వారా కాంటాక్టర్ జనరేటర్ పొటెన్షియోమీటర్ను తరలించడానికి డ్రైవ్ చేస్తుంది, తద్వారా వోల్టేజ్ వ్యత్యాసం సున్నా అయినప్పుడు, మోటారు ఆగిపోతుంది, తద్వారా సర్వో ప్రభావాన్ని సాధించవచ్చు.
సర్వో PWMల ప్రోటోకాల్లు అన్నీ ఒకే విధంగా ఉంటాయి, కానీ తాజా సర్వోలు కనిపించడం భిన్నంగా ఉండవచ్చు.
ప్రోటోకాల్ సాధారణంగా: 0.5ms ~ 2.5ms లో అధిక స్థాయి వెడల్పు వివిధ కోణాల ద్వారా తిరగడానికి సర్వో నియంత్రించడానికి.
V. సర్వో మోటార్లు ఎలా పని చేస్తాయి
దిగువ బొమ్మ పవర్ ఆపరేషనల్ యాంప్లిఫైయర్ LM675తో తయారు చేయబడిన సర్వో మోటార్ కంట్రోల్ సర్క్యూట్ను చూపుతుంది మరియు మోటారు DC సర్వో మోటార్. ఫిగర్ నుండి చూడగలిగినట్లుగా, పవర్ ఆపరేషనల్ యాంప్లిఫైయర్ LM675 15V ద్వారా సరఫరా చేయబడుతుంది మరియు 15V వోల్టేజ్ RP 1 ద్వారా కార్యాచరణ యాంప్లిఫైయర్ LM675 యొక్క ఇన్-ఫేజ్ ఇన్పుట్కు జోడించబడుతుంది మరియు LM675 యొక్క అవుట్పుట్ వోల్టేజ్ సర్వో మోటార్ ఇన్పుట్కు జోడించబడుతుంది. మోటారు వేగం యొక్క నిజ-సమయ గుర్తింపు కోసం స్పీడ్ కొలత సిగ్నల్ జనరేటర్తో మోటారు అమర్చబడి ఉంటుంది. వాస్తవానికి, స్పీడ్ సిగ్నల్ జెనరేటర్ ఒక రకమైన జనరేటర్, మరియు దాని అవుట్పుట్ వోల్టేజ్ భ్రమణ వేగానికి అనులోమానుపాతంలో ఉంటుంది. స్పీడ్ కొలిచే సిగ్నల్ జనరేటర్ G నుండి వోల్టేజ్ అవుట్పుట్ వోల్టేజ్ డివైడర్ సర్క్యూట్ తర్వాత స్పీడ్ ఎర్రర్ సిగ్నల్గా ఆపరేషనల్ యాంప్లిఫైయర్ యొక్క ఇన్వర్టింగ్ ఇన్పుట్కు తిరిగి అందించబడుతుంది. స్పీడ్ కమాండ్ పొటెన్షియోమీటర్ RP1 ద్వారా సెట్ చేయబడిన వోల్టేజ్ విలువ R1.R2 ద్వారా వోల్టేజ్ విభజన తర్వాత కార్యాచరణ యాంప్లిఫైయర్ యొక్క ఇన్-ఫేజ్ ఇన్పుట్కు జోడించబడుతుంది, ఇది రిఫరెన్స్ వోల్టేజ్కు సమానం.
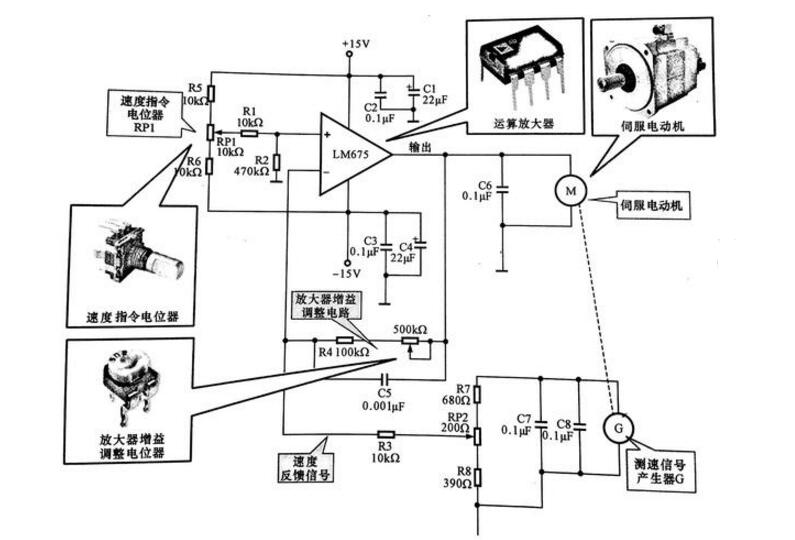
సర్వో మోటార్ నియంత్రణ స్కీమాటిక్
సర్వోమోటర్: సర్వోమోటర్ కోసం అక్షరం M ద్వారా సూచించబడుతుంది, ఇది డ్రైవ్ సిస్టమ్కు శక్తికి మూలం. ఆపరేషనల్ యాంప్లిఫైయర్: సర్క్యూట్ పేరుతో సూచించబడుతుంది, అనగా, LM675, సర్వో కంట్రోల్ సర్క్యూట్లోని యాంప్లిఫైయర్ ముక్క, ఇది సర్వో మోటార్కు డ్రైవ్ కరెంట్ను అందిస్తుంది.
స్పీడ్ కమాండ్ పొటెన్షియోమీటర్ RP1: సర్క్యూట్లో కార్యాచరణ యాంప్లిఫైయర్ యొక్క రిఫరెన్స్ వోల్టేజ్ను సెట్ చేస్తుంది, అనగా స్పీడ్ సెట్టింగ్. యాంప్లిఫైయర్ గెయిన్ అడ్జస్ట్మెంట్ పొటెన్షియోమీటర్ RP2: సర్క్యూట్లో వరుసగా యాంప్లిఫైయర్ గెయిన్ మరియు స్పీడ్ ఫీడ్బ్యాక్ సిగ్నల్ పరిమాణాన్ని చక్కగా ట్యూన్ చేయడానికి ఉపయోగిస్తారు.
మోటారు యొక్క లోడ్ మారినప్పుడు, ఆపరేషనల్ యాంప్లిఫైయర్ యొక్క విలోమ ఇన్పుట్కు తిరిగి ఇవ్వబడిన వోల్టేజ్ కూడా మారుతుంది, అనగా, మోటారు యొక్క లోడ్ పెరిగినప్పుడు, వేగం తగ్గుతుంది మరియు స్పీడ్ సిగ్నల్ జనరేటర్ యొక్క అవుట్పుట్ వోల్టేజ్ కూడా తగ్గుతుంది, తద్వారా ఆపరేషనల్ యాంప్లిఫైయర్ యొక్క విలోమ ఇన్పుట్ వద్ద వోల్టేజ్ తగ్గుతుంది. యాంప్లిఫైయర్ పెరుగుతుంది. దీనికి విరుద్ధంగా, లోడ్ చిన్నదిగా మారినప్పుడు మరియు మోటారు వేగం పెరిగినప్పుడు, స్పీడ్ కొలిచే సిగ్నల్ జనరేటర్ యొక్క అవుట్పుట్ వోల్టేజ్ పెరుగుతుంది, కార్యాచరణ యాంప్లిఫైయర్ యొక్క విలోమ ఇన్పుట్కు జోడించిన ఫీడ్బ్యాక్ వోల్టేజ్ పెరుగుతుంది, ఈ వోల్టేజ్ మరియు రిఫరెన్స్ వోల్టేజ్ మధ్య వ్యత్యాసం తగ్గుతుంది, కార్యాచరణ యాంప్లిఫైయర్ యొక్క అవుట్పుట్ వోల్టేజ్ తగ్గుతుంది.
విచారణ పంపండి


X
మీకు మెరుగైన బ్రౌజింగ్ అనుభవాన్ని అందించడానికి, సైట్ ట్రాఫిక్ను విశ్లేషించడానికి మరియు కంటెంట్ను వ్యక్తిగతీకరించడానికి మేము కుక్కీలను ఉపయోగిస్తాము. ఈ సైట్ని ఉపయోగించడం ద్వారా, మీరు మా కుక్కీల వినియోగానికి అంగీకరిస్తున్నారు.
గోప్యతా విధానం